 | ||
| ⓒ 뉴스타운 | ||
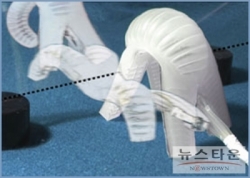
오징어, 불가사리, 그리고 벌레와 같은 무척추동물 모양을 본 딴 로봇이라면 복잡 정교한 기계 부속이 없이도 자연스런 동작을 구현할 수 있다.
'사이언티픽 아메리칸(Scientific American)' 은 11월 30일 기사에서 지금까지 로봇을 주로 ‘뼈대’가 있는 로봇을 주류로 생각해왔으나 새로운 개념의 ‘뼈대 없는’ 즉 무척추 로봇을 소개해 눈길을 끈다.
로봇하면 떠올리는 복잡한 기계 부속과 전기, 전자 시스템, 모터 등 등. 정교한 움직임과 장애물을 헤쳐 나가기 위해서는 이런 것들을 떠올린다.
미국 하버드 대학의 화학 및 재료과학자 죠지 화이트 사이즈와 박사 후 연구과정의 펠로우(fellow) 로버트 쉐퍼드는 이런 척추동물 방식의 '딱딱한' 방법을 치워 버렸다. 대신 그들은 보다 유연한 무척추 동물, 즉 오징어, 불가사리, 벌레 등을 모델로 한 부드러운 접근을 시도했다. 탄성 폴리머와 공기 펌프로 복잡한 움직임을 구현할 수 있는 로봇을 만들었다.
얼마나 복잡하냐고? 그들이 만든 5 센티미터 두께의 네 발 달린 로봇은 영어 'Y'자 두 개를 위 아래로 이어 붙인 형태인데, 기어 다닐 수 있고, 단 2cm 높이의 림보(막대기를 걸쳐 놓고 그 아래로 몸을 뒤로 젖히고 빠져 나가며 추는 춤. 막대의 높이는 매번 점점 더 낮춰짐) 게임을 거뜬하게 해치운다. 소프트 석판 인쇄(soft lithography) 방식으로 제작한 로봇 본체에 공기 펌프로 움직임을 구현한 것이다. 소프트 석판 인쇄란 스탬프(stamp), 몰드(mould) 혹은 마스크(mask) 같이 패턴이 있는 탄성체를 써서 원하는 물체를 만드는 방법이다.
이들의 연구는 복잡한 기계 부품이나 어셈블리(assembly) 없이도 간단한 동물 형태로 로봇이나 기계를 만들 수 있음을 고려해 볼 수 있음을 보여준다.
모양을 바꿀 수 있는 로봇의 상단은 안에 공기가 지나갈 수 있도록 만들었고, 밑단은 이보다 좀 단단한 폴리머로 만들었다. 그 사이에 장력을 제한하면서 밀봉도 겸하는 동력층을 끼워 넣었고 두터운 실리콘 접착제로 봉했다. 공기가 다양한 크기의 압력으로 주입되자 여러 방향으로 상단층이 부풀어 오르거나 굽어 내렸다. 예를 들면 로봇은 발을 들어 올리거나 4 발 중 3 발을 안정되어 바닥에 설 수 있게 자세를 취한다.

뉴스타운
뉴스타운TV 구독 및 시청료 후원하기
뉴스타운TV






















![[특별대담] 제22대 국회의원 선거 자유민주당 인천 서구병 이진기 예비후보](/news/photo/202403/600022_545770_3853.jpg)





![[긴급시국분석] 북한의 내년 4월 총선 전후 기습남침과 좌파들의 내란 및 전민봉기 철저히 대비하라!](/news/thumbnail/202312/592978_536686_4219_v150.jpg)